Redis为什么那么快 🔗
- 纯内存操作
- 单线程操作,避免了频繁的上下文切换
- 采用了非阻塞I/O多路复用机制 我们的redis-client在操作的时候,会产生具有不同事件类型的socket。在服务端,有一段I/0多路复用程序,将其置入队列之中。然后,文件事件分派器,依次去队列中取,转发到不同的事件处理器中。
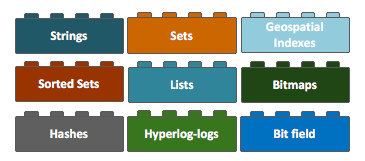
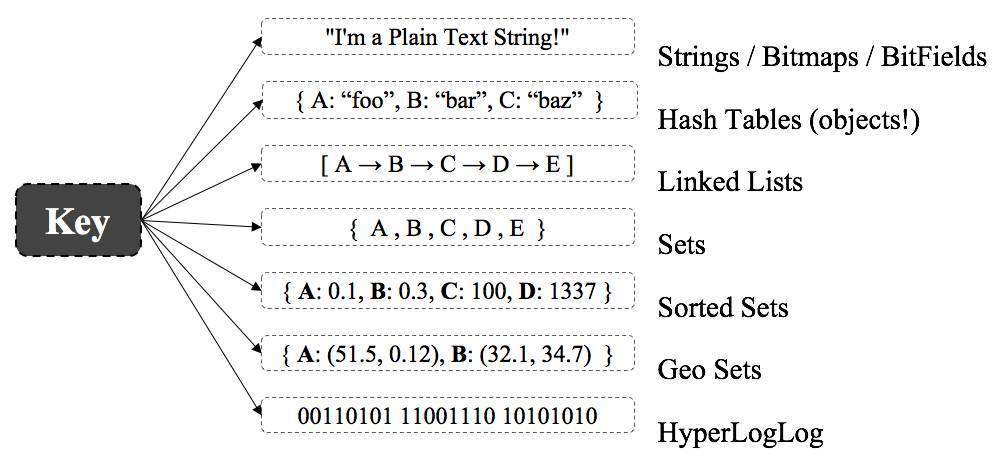
Redis数据类型 🔗
- String,Hash,List,Set,SortedSet
- Pub/Sub
- HyperLogLog(2.8.9版本新增):用来做基数统计的算法,HyperLogLog 的优点是,在输入元素的数量或者体积非常非常大时,计算基数所需的空间总是固定 的、并且是很小的。使用场景最常见的就是计算网站UV等,对数据精度要求不高
- Geo(3.2版本新增):GEO(地理位置)的支持,主要是对经纬度一个位置计算等特性
- BitMap
- BloomFilter
Redis的过期策略以及内存淘汰机制 🔗
三种过期策略 🔗
- 定时删除:在设置键的过期时间的同时,创建一个定时器(timer),让定时器在键的过期时间来临时,立即执行对键的删除操作;
- 惰性删除:放任键过期不管,但是每次从键空间中获取键时,都检查取得的键是否过期,如果过期的话,就删除该键;如果没有过期,那就返回该键;
- 定期删除:每隔一段时间,程序就对数据库进行一次检查,删除里面的过期键。至于删除多少过期键,以及要检查多少个数据库,则由算法决定。
Redis采用的是定期删除+惰性删策略。
为什么不用定时删除策略?定时删除策略需要定时器来监视key,过期则自动删除。虽然内存及时释放了,但是CPU消耗大。在大并发的情况下,这一策略得不偿失
Redis采用的是定期删除+惰性删策略工作机制。
定期删除,redis默认每100ms检查一次是否存在过期key,有则删除。需要说明的是redis并不是100ms检查所有的key一次,而是随机进行抽取检查。因此,惰性删除派上用处。
惰性删策略延伸出来的问题就是,redis缓存淘汰机制
Redis(3.0版本)6种缓存淘汰机制 🔗
1. no-enviction(驱逐):禁止驱逐数据(不删除数据策略,达到最大的内存限制时,如果有更多的数据写入,返回错误给客户端)
2. allkeys-lru:所有key通用,优先删除最少使用的key(less recently used,LRU算法)
3. allkeys-random :所有key通用,随机删除一部分key
4. volatile-lru:只限于设置了expire的部分,优先删除最少使用的key(less recently used,LRU算法)
5. volatile-random:只限于设置了 expire 的部分; 随机删除一部分key
6. volatile-ttl:只限于设置了 expire 的部分; 优先删除剩余时间(time to live,TTL) 短的key。
注意:如果没有设置 expire 的key, 不满足先决条件(prerequisites); 那么 volatile-lru, volatile-random 和 volatile-ttl 策略的行为, 和 noeviction(不删除) 基本上一致。
一般来说:如果分为热数据与冷数据, 推荐使用allkeys-lru策略。 也就是, 其中一部分key经常被读写. 如果不确定具体的业务特征, 那么allkeys-lru是一个很好的选择。 如果需要循环读写所有的key, 或者各个key的访问频率差不多, 可以使用allkeys-random策略, 即读写所有元素的概率差不多。
假如要让 Redis 根据 TTL 来筛选需要删除的key, 请使用volatile-ttl策略。
Redis持久化原理 🔗
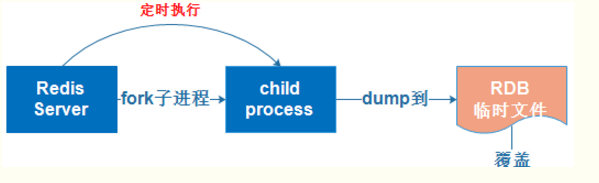
快照(特点:bgsave做镜像全量持久化) 🔗
缺省情况下,Redis把数据快照存放在磁盘上的二进制文件中,文件名为dump.rdb。你可以配置Redis的持久化策略,例如数据集中每N秒钟有超过M次更新,就将数据写入磁盘;或者你可以手工调用命令SAVE或BGSAVE。 工作原理:
- 主进程开启一个 Redis forks(子进程).
- 子进程开始将数据写到临时RDB文件中。
- 当子进程完成写RDB文件,用新文件替换老文件。
- bgsave的原理是什么?你给出两个词汇就可以了,fork和cow。fork是指redis通过创建子进程来进行bgsave操作,cow指的是copy on write,子进程创建后,父子进程共享数据段,父进程继续提供读写服务,写脏的页面数据会逐渐和子进程分离开来。
AOF(特点:AOF增量持久化) 🔗
AOF持久化以日志的形式记录服务器所处理的每一个写、删除操作,查询操作不会记录,以文本的方式记录,可以打开文件看到详细的操作记录。

Redis主从复制(3.0开始支持)原理 🔗
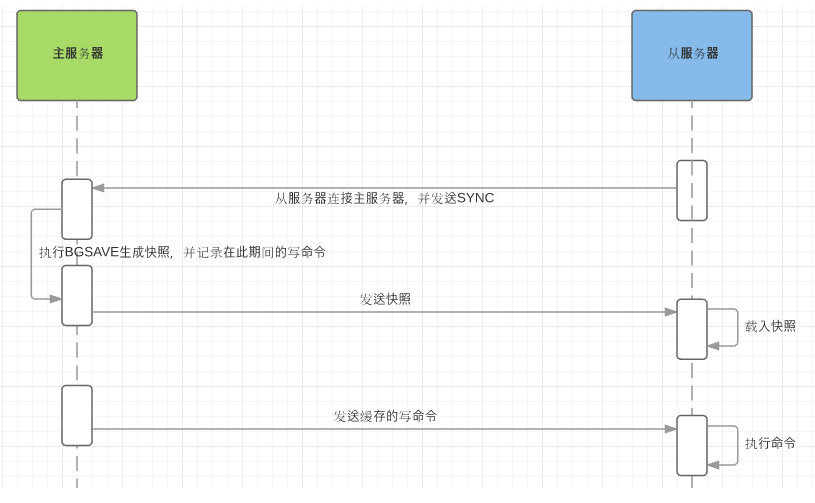
全量同步 🔗
- 当启动一个slave node的时候,它会发送一个PSYNC命令给master
- 如果这是slave node重新链接master,master会将缺少的数据发送给slave,如果是第一次链接master,则会触发一次full resynchronization,开始 full resynchronization的时候,master启动一个后台线程,先将现有数据生成一个零时的rdb文件,生成文件后,master会将这个rdb文件发送给slave,slave会先把这个rdb文件存放到本地磁盘,然后在加载到内存,然后master会将生成rdb这段时间内接收到的在内存中的数据发送给slave,slave也会接收这份数据。
- slave如果跟master网络故障,断开了,当重新连接上以后,master发现有多个slave都来重新连接,master会生成一个rdb文件,将这个文件同时发送个多个slave node
主从复制的断点续传 🔗
- redis从2.8开始就支持断点续传功能,即当slave与master断开后,重新连接时,会继续从上一次断开的点继续传送数据,而不是full resynchronization。
- master会在内存中创建一个backlog,master和slave都会保存一个offset,slave还有一个master id,offset就是保存在backlog中的,如果slave和master网络断开,重新连接后slave会让master从replica offset开始续传。但是如果没有找到offset,则会触发full resynchronization。
无磁盘化复制 🔗
- master在内存中直接创建rdb,然后直接发送给slave,不会存入本地磁盘
- 参数配置
repl-diskless-sync
repl-diskless-sync-delay, 等待一定时长在复制,因为要等更多的slave重新连接
过期key处理 🔗
- slave不会有过期Key,只有master有过期key,如果master过期了一个可以或者通过LRU算法淘汰了一个key,那么master会模拟发送一个del命令给slave
Redis-Cluster集群 🔗
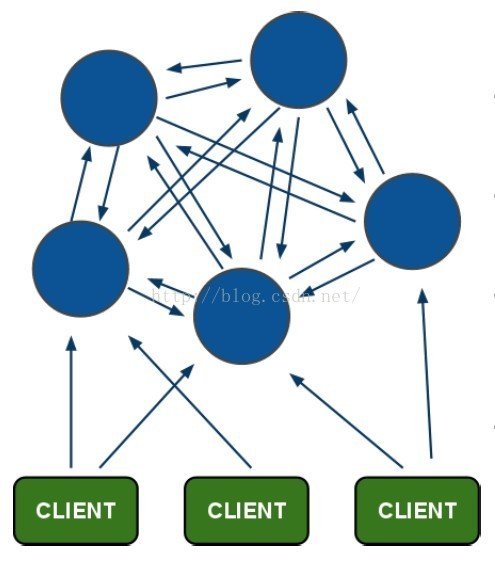
- 所有的redis节点彼此互联(PING-PONG机制),内部使用二进制协议优化传输速度和带宽。
- 节点的fail是通过集群中超过半数的节点检测失效时才生效。
- 客户端与redis节点直连,不需要中间proxy层.客户端不需要连接集群所有节点,连接集群中任何一个可用节点即可。
- redis-cluster把所有的物理节点映射到[0-16383]slot上(不一定是平均分配),cluster 负责维护node<->slot<->value。
- Redis集群预分好16384个桶,当需要在 Redis 集群中放置一个 key-value 时,根据 CRC16(key) mod 16384的值,决定将一个key放到哪个桶中。
为什么是16384(2^14)个? 在redis节点发送心跳包时需要把所有的槽放到这个心跳包里,以便让节点知道当前集群信息,16384=16k,在发送心跳包时使用char进行bitmap压缩后是2k(2 * 8 (8 bit) * 1024(1k) = 2K),也就是说使用2k的空间创建了16k的槽数。
虽然使用CRC16算法最多可以分配65535(2^16-1)个槽位,65535=65k,压缩后就是8k(8 * 8 (8 bit) * 1024(1k) = 8K),也就是说需要需要8k的心跳包,作者认为这样做不太值得;并且一般情况下一个redis集群不会有超过1000个master节点,所以16k的槽位是个比较合适的选择。
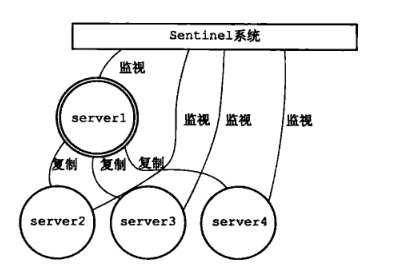
Redis哨兵 🔗
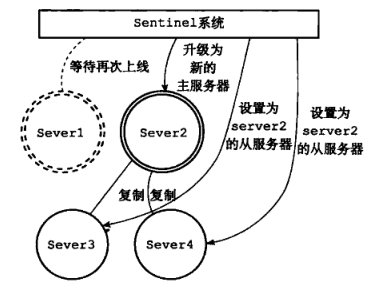
在Server1 掉线后:
 升级Server2 为新的主服务器:
升级Server2 为新的主服务器:
-
Sentinel的作用:
- Master 状态监测
- 如果Master 异常,则会进行Master-slave 转换,将其中一个Slave作为Master,将之前的Master作为Slave
- Master-Slave切换后,master_redis.conf、slave_redis.conf和sentinel.conf的内容都会发生改变,即master_redis.conf中会多一行slaveof的配置,sentinel.conf的监控目标会随之调换
-
Sentinel的工作方式:
- 每个Sentinel以每秒钟一次的频率向它所知的Master,Slave以及其他 Sentinel 实例发送一个 PING 命令
- 如果一个实例(instance)距离最后一次有效回复 PING 命令的时间超过 down-after-milliseconds 选项所指定的值, 则这个实例会被 Sentinel 标记为主观下线。
- 如果一个Master被标记为主观下线,则正在监视这个Master的所有 Sentinel 要以每秒一次的频率确认Master的确进入了主观下线状态。
- 当有足够数量的 Sentinel(大于等于配置文件指定的值)在指定的时间范围内确认Master的确进入了主观下线状态, 则Master会被标记为客观下线
- 在一般情况下, 每个 Sentinel 会以每 10 秒一次的频率向它已知的所有Master,Slave发送 INFO 命令
- 当Master被 Sentinel 标记为客观下线时,Sentinel 向下线的 Master 的所有 Slave 发送 INFO 命令的频率会从 10 秒一次改为每秒一次
- 若没有足够数量的 Sentinel 同意 Master 已经下线, Master 的客观下线状态就会被移除。
- 若 Master 重新向 Sentinel 的 PING 命令返回有效回复, Master 的主观下线状态就会被移除。
Redis和数据库双写一致性问题 🔗
一致性问题是分布式系统常见问题,可以分为最终一致性和强一致性。所以弄清诉求 数据库强一致性,不放缓存,我们所做的一切只是保证最终一致性,另外无法完全避免,讨论三种更新策略:
- 先更新数据库,再更新缓存
- 先删除缓存,再更新数据库
- 先更新数据库,再删除缓存
先更新数据库,再更新缓存 🔗
这套方案,大家是普遍反对的,为什么呢?有如下两点原因: 原因一、线程安全问题,同时有请求A和请求B进行更新操作,那么会出现:
线程A更新了数据库
线程B更新了数据库
线程B更新了缓存
线程A更新了缓存
这就出现请求A更新缓存应该比请求B更新缓存早才对,但是因为网络等原因,B比A更早更新了缓存。这就导致了脏数据,因此不考虑!
原因二、业务场景考虑
- 如果是写数据库场景比较多,读数据库场景比较少业务需求。“先更新数据库,再更新缓存"这种方案会导致,数据压根还没读到,缓存就被频繁的更新浪费性能
- 如果写入数据库是经过复杂计算以后再更新数据库,那么每次写入数据库后更新缓存,性能存在浪费
先删除缓存,再更新数据库 🔗
该方案会导致不一致的原因:同时有一个请求A进行更新操作,另一个请求B进行查询操作。那么就会出现以下情形: 情况一:多进程读写原因
请求A进行写操作,删除缓存
请求B查询发现缓存不存在
请求B去数据库查询得到旧值
请求B将旧值写入缓存
请求A将新值写入数据库
上诉请求出现不一致的情况,如果没采用缓存过期策略。则缓存数据一直是脏数据。
情况二:MYSQL主从分离原因
请求A进行写操作,删除缓存;
请求A将数据写入数据库了;
请求B查询缓存发现,缓存没有值;
请求B去从库查询,这时,还没有完成主从同步,因此查询到的是旧值;
请求B将旧值写入缓存;
数据库完成主从同步,从库变为新值;
解决方案:采用延迟双删策略。先删除缓存,再删除数据库,进程休眠1秒再次删除缓存
先更新数据库,再删除缓存 🔗
这种情况不存在并发问题么? 不是的。假设这会有两个请求,一个请求A做查询操作,一个请求B做更新操作,那么会有如下情形产生:
- 缓存刚好失效;
- 请求A查询数据库,得一个旧值;
- 请求B将新值写入数据库;
- 请求B删除缓存;
- 请求A将查到的旧值写入缓存; ok,如果发生上述情况,确实是会发生脏数据。
解决方案:发生上述情况有一个先天性条件,就是上述步骤(3)的写数据库操作比步骤(2)的读数据库操作耗时更短,才有可能使得步骤(4)先于步骤(5)。可是,大家想想,数据库的读操作的速度远快于写操作的(不然做读写分离干嘛,做读写分离的意义就是因为读操作比较快,耗资源少),因此步骤(3)耗时比步骤(2)更短,这一情形很难出现。 首先,给缓存设有效时间是一种方案。其次,采用策略2(先删除缓存,再更新数据库)里给出的异步延时删除策略,保证读请求完成以后,再进行删除操作。
如何解决redis的并发竞争key问题 🔗
分析:这个问题大致就是,同时有多个子系统去set一个key。这个时候要注意什么呢?大家思考过么。需要说明一下,博主提前百度了一下,发现答案基本都是推荐用redis事务机制。博主不推荐使用redis的事务机制。因为我们的生产环境,基本都是redis集群环境,做了数据分片操作。你一个事务中有涉及到多个key操作的时候,这多个key不一定都存储在同一个redis-server上。因此,redis的事务机制,十分鸡肋。
解决方案
-
如果对key操作不要求顺序
这种情况下,准备一个分布式锁,谁抢到锁谁set即可 -
如果对key操作要求顺序
假设有一个key1,系统A需要将key1设置为valueA,系统B需要将key1设置为valueB,系统C需要将key1设置为valueC.
期望按照key1的value值按照 valueA–>valueB–>valueC的顺序变化。这种时候我们在数据写入数据库的时候,需要保存一个时间戳。假设时间戳如下
系统A key 1 {valueA 3:00}
系统B key 1 {valueB 3:05}
系统C key 1 {valueC 3:10}
那么,假设这会系统B先抢到锁,将key1设置为{valueB 3:05}。接下来系统A抢到锁,发现自己的valueA的时间戳早于缓存中的时间戳,那就不做set操作了。以此类推。
或者使用队列,将set操作进行串联即可
redis常见性能问题和解决方案 🔗
- Master写内存快照,save命令调度rdbSave函数,会阻塞主线程的工作,当快照比较大时对性能影响是非常大的,会间断性暂停服务,所以Master最好不要写内存快照。
- Master AOF持久化,如果不重写AOF文件,这个持久化方式对性能的影响是最小的,但是AOF文件会不断增大,AOF文件过大会影响Master重启的恢复速度。Master最好不要做任何持久化工作,包括内存快照和AOF日志文件,特别是不要启用内存快照做持久化,如果数据比较关键,某个Slave开启AOF备份数据,策略为每秒同步一次。
- Master调用BGREWRITEAOF重写AOF文件,AOF在重写的时候会占大量的CPU和内存资源,导致服务load过高,出现短暂服务暂停现象。
- Redis主从复制的性能问题,为了主从复制的速度和连接的稳定性,Slave和Master最好在同一个局域网内
Redis6.0 多线程 🔗
其实本质只是在网络IO上面实现了多线程读取和写入,然后进行执行队列,执行还是单线程
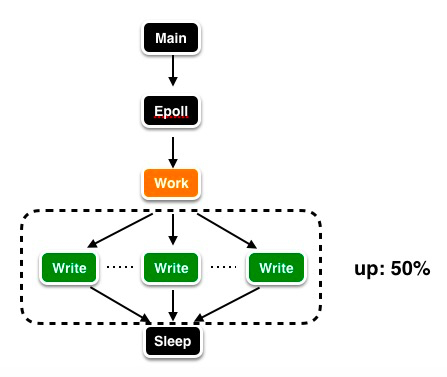 加入多线程 IO 之后,整体的读流程如下:
加入多线程 IO 之后,整体的读流程如下:
- 主线程负责接收建连请求,读事件到来(收到请求)则放到一个全局等待读处理队列
- 主线程处理完读事件之后,通过 RR(Round Robin) 将这些连接分配给这些 IO 线程,然后主线程忙等待(spinlock 的效果)状态
- IO 线程将请求数据读取并解析完成(这里只是读数据和解析并不执行)
- 主线程执行所有命令并清空整个请求等待读处理队列(执行部分串行)
上面的这个过程是完全无锁的,因为在 IO 线程处理的时主线程会等待全部的 IO 线程完成,所以不会出现data race的场景。
Redis新特性 🔗
-
Redis Module
- 任何C/C++程序现在都可以运行在Redis上
- Modules是用一种本地的方式来扩展Redis的新用例和功能
- 使用现有的或者添加新的数据结构
- 享受简单,无限可扩展性和高可用性的同时保持着redis的本机的速度
-
Redis Search 高性能的全文搜索引擎(Faster, in-memory, highly available full text search),可作为Redis Module运行在Redis上。但是它与其他Redis搜索库不同的是,它不使用Redis内部数据结构,例如:集合、排序集(ps.后面会写一篇基于Redis的数据结构来设计搜索引擎),Redis原声的搜索还是有很大的局限性,简单的分词搜索是可以满足,但是应用到复杂的场景就不太适合。
-
Redis ML 机器学习模型服务器